

机器人实训室设备,机器人实训室方案,机器人实训装置是专门为用户解决疑难问题的,非常具有代表性,在客户进行产品选型前,我们一般建议用户先看下机器人实训室设备,机器人实训室方案,机器人实训装置。这样能对用户选型有非常大的帮助。

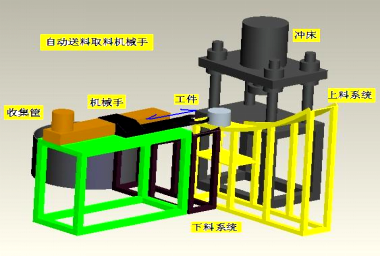
1、冲床取件送料机械手
配冲压气缸(模拟冲压机床冲压)、上下料架、工件、手持编程控制系统。3轴“86、57”步进电机和减速机。配气泵、气爪,配机械手电气系统实训电路板(或含电柜),方便学生(学员)开展机械手电气和编程训练。
冲床取件送料机械手,由上料系统,下料系统,收集,电控系统等部分组成。工作过程:上料系统将一个工件选出,机械手夹取工件送入冲床指定位置,放开工件并退回;冲床冲压工件;机械手夹取工件送到下料系统收集;机械手复位。
配套的工程教学内容:冲床取件送料机械手的构成,步进电机、气动元件选择,机械结构组合和装配,编程方法,气动元件控制,电气控制箱设计安装等。
2、气动机械手
气动教学机械手可完成:气动手爪抓取物料,手臂上下、左右移动,气动手爪旋转180度等动作,配15路手持示教编程控制器,广泛用于教学、科研、工业生产中自动抓取物料。行程定位准确,运行可靠。随着工业机械化和自动化的发展以及气动技术自身的一些优点,气动机械手已经广泛应用在生产自动化的各个领域。

气动机械手参数:
作动型式 复动式
使用流体 空气
使用压力范围 Kgf/cm2 (KPa) 1.5~9(150~900)
X轴(伸缩) 亚德客型双杆双轴滑台气缸STMB32-150
Z轴(上下) 亚德客型双杆双轴滑台气缸STMB20-80
旋转轴(R轴) 浙江天奥CRQ2BS15-180度回转旋转气缸
气爪 浙江天奥20D平行开闭气爪
安装方式 桌面安装
本体质量 38kg
尺寸 (臂长*宽*高)310*310*380mm
功率 0.2KW
供电电源 220V、50Hz;

编程示教编程,可实现多缸联动性能稳定,配套使用说明书。
控制系统:
操作面板体积小,外型美观,操作更简便,采用美国AMD公司16位高速CPU,系统响应速度快,动作控制精度高,系统稳定,5.128×64点阵LCD优质液晶,鲜亮清晰,中英文显示,人机界面友好,一流的PCB采用四层板贴片结构,抗干扰能力更强,使用干接点信号和工业上位机输入、输出相连接,避免了相互干扰。丰富的保护功能,自动检测机器运行情况,及时显示故障报警及故障原因,确保机器的使用安全,具有输出短路保护功能,有效防止因外部电路短路造成的损坏。
配气泵,配机械手电气系统实训电路板(或含电柜),方便学生(学员)开展机械手电气和编程训练。


3、5轴自动焊接机专机
5轴自动焊接机专机采用直角关节结构,由X Y Z R1 R2 5轴组成,步进电机驱动,最大工作负载3公斤,重复定位精度±0.1mm。配华普六轴联动示教编程型控制系统,2点确定空间直线,3点确定空间圆弧,容易编程,快速构件焊接、涂胶机器人。

技术参数:
项目 参数
自由度 6轴
驱动方式 5步进电机驱动
有效负载 3kg
重复定位精度 ±0.05 mm
标准有效运动范围
X 350 mm
Y 330 mm
Z 250 mm
R1±90°
R2±250°
额定速度
X轴 180 mm /s
Y轴 180 mm /s
Z轴 160 mm /s
R1轴 45°/s
R2轴 45°/s
周围环境 温度 0~45℃
湿度 20~80%(不结露)
振动 4.9m/s2以下
安装方式 地面安装
本体质量 72kg
机架材质 采用方钢钢结构,烤漆
控制系统特点:
1、6轴联动,采用5.6寸液晶屏执行ISO国际标准G代码;
2、采用多层线路板,32位高性能的CPU和超大规模可编程器件FPGA,系统的整个工艺采用表贴元器件,从而使整套系统更为紧凑;
3、采用多达20级的运动指令缓冲区运动控制芯片,特别适合高速多线段或圆弧连续插补的运动控制;
4、24路输入,12路输出接口;
5、全光耦隔离,抗干扰性强,运行稳定;
6、有手动,自动,归零,编辑,录入操作;
7、可通过键盘对机械手进操作;在示教编程的基础上,指挥六个步进/伺服电机完成指定的动作;
8、示教编程过程支持绝对位置、相对位置、延时、等待任意IO口输入信号、控制任意IO口输出信号、程序段循环调用等等。
9、采用数字交流步进电机驱动方式,适合精度高。
含手持编程控制系统,配机械手电气系统实训电路板(不含电柜),配270二保焊机。

4、模块可拆装6轴教学机器人
(配6个谐波减速器, 配气动爪; 可拆装,方便学生实训)

模块化可拆装6轴教学机器人由机器人本体、电气控制系统及控制软件及计算机等部分组成。用于机器人基础认知实验,机械部分可拆装,电气部分可用于工业机器人的控制、编程实验。
模块6轴机器人有六个轴,6个自由度,采用模块组合式串联开链结构,即机器人各关节部分由旋转关节模块或移动关节模块组合串联连接,如图所示。采用6个步进电机驱动。铁质底座、手腕、铝合手臂金烤漆处理,方便实训拆装。 串联关节式结构使每一模块可独立控制运行,可组合成3-6自由度不同功能机器人,最大工作负载1公斤,各模块的传动,重复定位精度±0.5mm,定位准确,运行精度高。机器人各模块采用步进/伺服电机驱动,并通过6轴机器人控制系统使机器人任意组合成3~6自由度机器人,能够在工作空间内任意位置精确定位。

系统特点:
1、6轴联动,采用8寸彩色液晶屏执行ISO国际标准G代码;
2、采用多层线路板,32位高性能的CPU和超大规模可编程器件FPGA,系统的整个工艺采用表贴元器件,从而使整套系统更为紧凑;
3、采用多达20级的运动指令缓冲区运动控制芯片,特别适合高速多线段或圆弧连续插补的运动控制;
4、24路输入,12路输出接口;
5、全光耦隔离,抗干扰性强,运行稳定;
6、有手动,自动,归零,编辑,录入操作;
7、可通过键盘对机械手进操作;在示教编程的基础上,指挥六个电机完成指定的动作;
8、示教编程过程支持绝对位置、相对位置、延时、等待任意IO口输入信号、控制任意IO口输出信号、程序段循环调用等。

参数介绍:
项目 参数
自由度 6自由度 6步进电机驱动,配6个谐波减速器,实现6轴联动模块化结构,可组成3-6自由度机器人,合适多次反复拆装
编程方式 示教编程
有效负载 1kg
重复定位精度 ±0.5 mm
编程方式
运动范围
J1轴 ±120°
J2轴 +120°~-65°
J3轴 +85°~-130°
J4轴 ±160°
J5轴 ±95°
J6轴 ±250°
额定速度
J1轴 40°/s
J2轴 45°/s
J3轴 45°/s
J4轴 35°/s
J5轴 35°/s
J6轴 25°/s
周围环境
温度 0~45℃
湿度 20~80%(不结露)
振动 0.1mm/s以下安装方式
地面安装本体质量 48kg
本体尺寸 380*330*900
电源 220V
功率 500W
配控制箱,配2指气爪,含气源。
机器人各模块可拆装,方便学生实训,并通过6轴机器人控制系统使机器人任意组合成3~6自由度机器人,能够在工作空间内任意位置精确定位。

5、6轴机器人

我公司6自由度通用工业机械手机器人,采用垂直多关节串连谐波减速关节结构,伺服/步进电机驱动,最大工作负载3公斤,重复定位精度±0.5mm。
采用6路示教型控制系统,控制精度高,性能稳定。垂直多关节串连结构,运行灵活,主要应用于教学、科研和工业生产中喷漆、工件拾取和搬运等作业。
系统特点:
1、模块化的软件设计,6轴联动,示教编程屏,执行ISO国际标准G代码;
2、采用多层线路板,32位高性能的CPU和超大规模可编程器件FPGA,系统的整个工艺采用表贴元器件,从而使整套系统更为紧凑;
3、采用多达20级的运动指令缓冲区运动控制芯片,特别适合高速多线段或圆弧连续插补的运动控制;
4、12路输入,24路输出接口;
5、全光耦隔离,抗干扰性强,运行稳定;
6、有手动,自动,归零,编辑,录入操作;
7、可通过键盘对机械手进操作;在示教编程的基础上,指挥六个伺服电机完成指定的轨迹动作;
8、支持绝对位置、相对位置、延时、等待任意IO口输入信号、控制任意IO口输出信号、程序段循环调用等等。
9、六个轴采用数字交流伺服/步进电机驱动方式,适合精度高。
技术参数:
项目 参数
自由度 6
驱动方式 2伺服4步进电机驱动
有效负载 3kg
重复定位精度 ±0.5 mm
运动范围
J1轴 ±120°
J2轴 +120°~-65°
J3轴 +85°~-130°
J4轴 ±160°
J5轴 ±95°
J6轴 ±250°
额定速度
J1轴 45°/s
J2轴 40°/s
J3轴 45°/s
J4轴 45°/s
J5轴 45°/s
J6轴 40°/s
周围环境 温度 0~45℃
湿度 20~80%(不结露)
振动 4.9m/s2以下
安装方式 地面安装
本体质量 122kg
本体尺寸 480*330*1200mm
配气泵,配气爪,配电气系统实训电路板(不含电柜),方便学生(学员)开展机械手电气和编程训练。
主要应用于教学、科研和工业生产中喷漆、工件拾取和搬运等作业。

6、 6轴弧线喷涂机器人

空间三点,自动确定空间圆弧轨迹,方便构建喷涂、涂胶机器人结构组成
6轴弧线喷涂机器人采用直角坐标形式,由X,Y,Z和枪头旋转R1,工件旋转R2,送料台回转台旋转R3 6轴组成,采用“六轴联动3D示教编程型控制系统”,任意二点确定空间直线,任意三点确定空间圆弧。
人机界面友好,操作简便,具有良好的工作稳定性。重复定位精度±0.05mm。配电气控制箱。供电电源:220V、50Hz;电源容量:1KVA。系统存储多个工作程序,根据需要可以任意选择,便于选择和管理。
机构特点:
1、采用6轴联动3D示教编程型控制系统,任意二点确定空间直线,任意三点确定空间圆弧,满足空间弧线喷涂。
2、龙门架构,高強度铝合金材轨道,机架采用方钢钢结构,烤漆,机身整体采用坚固耐用,惯量小,动态性能稳定,长时间使用不变形,使定位精度精确。
3、采用皮带传动,配精密形星和谐波减速机,大大增加速度和带负荷的能力。
4、配电气系统实训电路板(不含电柜)及配工件回转台和支架。
产品技术参数
|
参数项目 |
参数指标 |
参数项目 |
参数指标 |
|
自由度 |
6 |
安装方式 |
龙门架安装 |
|
编程方式 |
示教编程 |
本体质量 |
120g |
|
有效负载 |
3kg |
本体尺寸 |
1200*550*350 mm |
|
驱动方式 |
1伺服5步进电机驱动 |
重复定位精度 |
正负0.05 mm |
|
|
|||
|
运动 范围 |
X轴 900mm |
额定 速度 |
500mm/s |
|
Y轴 300mm |
500mm/s |
||
|
Z轴 180mm |
300mmm/s |
||
|
R1轴 +180度~-180度 |
R1轴 40度/s |
||
|
R2轴 +120度~-120度 |
R2轴 40度/s |
||
|
R3轴 +180度~-180度 |
R3轴 40度/s |
||
主要配置
X轴电机采用1个伺服电机,由同步齿形带和高强度精密导轨传动;Y、Z轴采用步进电机驱动,精密形星减速机减速,同步齿形带和高强度精密导轨传动;R1、R2 、R3轴采用用步进电机驱动,精密谐波减速机减速。
操作培训及保修
提货方负责免费培训操作,直至达到独立操作水平为止。设备保修1年,终身维修。
包含的配件:
1)自动喷枪1把
2)6号气管20米
3)10升压力桶1个
4)24V电磁阀1只
5)待喷工件2件
6)配气泵1台,配电气系统实训电路板(或含电柜)。

7、四轴平面机器人

平面机器人由减速机、步进电机、气缸,爪旋,夹具等配件组成,
平面关节型机器人实现平面内定位和定向;一个移动关节,实现末端件升降运动。具体机械系统由基座、手臂和末端执行器三大部分组成,每一部分都有若干自由度,构成了一个多自由度的机械系统。基座具有回转机构(肩关节),手臂由大臂、小臂组成,末端执行器(手部)是一个钳爪式手部结构。本机器人具有高刚性、高精度、高速度、安装空间小及设计自由度大等优点,可以组装成焊接机器人、点胶机器人、光学检测机器人、拿放机器人及插件机器人等,从而应用于高效率的装配、焊接、密封、搬运和拿放等动作。
最大行程400mm, 最大负载2KG,人机界面友好,操作简便,具有良好的工作稳定性。重复定位精度±0.05mm。配电气控制箱。供电电源:220V、50Hz;电源容量:500KVA。系统存储多个工作程序,根据需要可以任意选择,便于选择和管理。
机身整体采用坚固耐用高強度铝合金外壳,烤漆,惯量小,动态性能稳定,长时间使用不变形。
配套的工程教学内容:平面送料机械手的构成,伺服电机、气动元件选择,机械结构组合和装配,编程方法,气动元件控制,电气控制箱设计安装等。
配气动爪、空气静音压缩机、搬运用工件等。